? Maritime Robotics unveiled SeaSight, the Situational Awareness and Collision Avoidance system

? Maritime Robotics’ new Situational Awareness (SA) and Collision Avoidance (COLAV) system increases safety and remote capabilities with LiDAR, Radar and AIS along with multiple high definition cameras providing full 360° coverage.
? “The Maritime Robotics Autonomy Onboard software is already world-leading – The additional SA capacity provided by SeaSight is the natural next step in this evolution.”, explains Runar Olsen, Product Manager for the Otter and Otter X USVs.
The SeaSight functions as an aiding system for the operator, improving safety and real time situational awareness. When Collision Avoidance is activated, the uncrewed vessel will avoid anything that might be at risk of interfering with the operation. This can be land, docks, vessels, buoys, animals, sea plants or other objects that are detected. If the uncrewed vessel is unable to locate a safe passage to the requested location, it will automatically enter Station Mode and await operator instructions.
SeaSight features multiple low light, high definition cameras that are stitched together to give the operator an exceptional overview of the surroundings. On larger vessels we also utilize thermal (IR) cameras for visibility in low- and no-light conditions.
In addition to the camera based SA functionality, SeaSight incorporates active sensors such as LiDAR and AIS. The 360° scanning LiDAR sensor used by SeaSight is primarily used in the advanced Collision Avoidance algorithm. The LiDAR sensor is also used to visually improve situational overview in poor visibility conditions.
The most advanced versions of SeaSight will also perform Sensor Fusion between the detected and tracked objects from video (daylight and thermal), LiDAR, Radar and AIS. These highly confident detections will be tracked and estimated over time giving the Maritime Robotics Autonomy Onboard engine a best possible Situational Awareness and understanding. The Autonomy Onboard engine will calculate the optimal USV behavior to navigate in accordance with the International Regulations for Preventing Collisions at Sea (COLREGS).
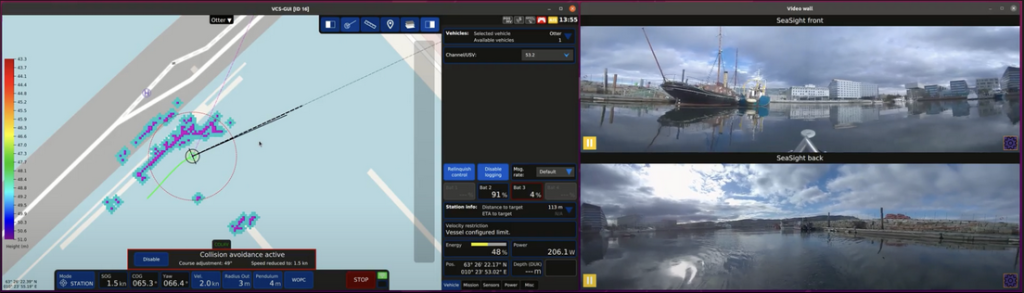
The detections will be provided to the operator as information overlaying the video stream and/or map. Only the most important details are shown to the operator to avoid information overload. This enhances the situational understanding for the operator and also clearly shows how the USV is operating and the cause of any discrepancy compared to commanded behavior. The Collision Avoidance system can easily be enabled and tuned to the operation area.
?? Source: Maritime Robotics